Online Nonlinear Regression with Extended Kalman Filter¶
Exctended Kalman Filter (EKF) can be used for systems where measurement or state process updates are nonlinear functions. In order to do nonlinear updates with EKF, the update function and its jacobian must be specified.
To demonstrate a simple nonlinear example, the following generalized linear model with log link & gaussian noise is used.

The above model can be represented in state-space form by:
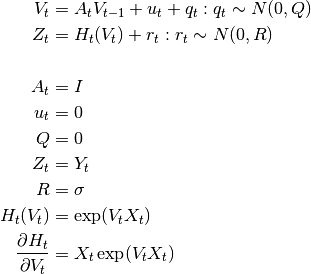
The process updates are linear whereas measurement updates are nonlinear.
Import EKF and start spark session.
import com.github.ozancicek.artan.ml.filter.ExtendedKalmanFilter import org.apache.spark.sql.SparkSession import org.apache.spark.sql.functions._ import org.apache.spark.ml.linalg._ val rowsPerSecond = 10 val numStates = 10
For EKF, it is necessary define the nonlinear function and its jacobian if there is any. Only the measurement function is nonlinear in this example, so it’s enough to define the function mapping the state to measurement and measurement jacobian.
In order to help these functions define evolving behaviour across measurements, they also accept processModel or measurementModel
as a second argument. So the signature of the function must be (Vector, Matrix) => Vector for the nonlinear
function and (Vector, Matrix) => Matrix for its jacobian. The second argument to these functions can be
set with setMeasurementModelCol``or ``setProcessModelCol. In this example, measurement model is used
for defining the features matrix, and the nonlinear update is done with the defined function.
// GLM with log link, states to be estimated are a, b // y = exp(a*x + b) + w, where w ~ N(0, 1) val a = 0.2 val b = 0.7 val noiseParam = 1.0 // UDF's for generating measurement vector ([y]) and measurement model matrix ([[x ,1]]) val measurementUDF = udf((x: Double, r: Double) => { val measurement = scala.math.exp(a * x + b) + r new DenseVector(Array(measurement)) }) val measurementModelUDF = udf((x: Double) => { new DenseMatrix(1, 2, Array(x, 1.0)) }) // Measurement function and its jacobian val measurementFunc = (in: Vector, model: Matrix) => { val measurement = model.multiply(in) measurement.values(0) = scala.math.exp(measurement.values(0)) measurement } val measurementJac = (in: Vector, model: Matrix) => { val dot = model.multiply(in) val res = scala.math.exp(dot(0)) val jacs = Array( model(0, 0) * res, res ) new DenseMatrix(1, 2, jacs) } val filter = new ExtendedKalmanFilter() .setStateKeyCol("stateKey") .setInitialStateMean(new DenseVector(Array(0.0, 0.0))) .setInitialStateCovariance( new DenseMatrix(2, 2, Array(10.0, 0.0, 0.0, 10.0))) .setMeasurementCol("measurement") .setMeasurementModelCol("measurementModel") .setProcessModel(DenseMatrix.eye(2)) .setProcessNoise(DenseMatrix.zeros(2, 2)) .setMeasurementNoise(new DenseMatrix(1, 1, Array(10))) .setMeasurementFunction(measurementFunc) .setMeasurementStateJacobian(measurementJac) .setCalculateMahalanobis
Generate the data & run the query with console sink.
val measurements = spark.readStream.format("rate") .option("rowsPerSecond", rowsPerSecond) .load() .withColumn("mod", $"value" % numStates) .withColumn("stateKey", $"mod".cast("String")) .withColumn("x", ($"value"/numStates).cast("Integer").cast("Double")) .withColumn("measurement", measurementUDF($"x", randn() * noiseParam)) .withColumn("measurementModel", measurementModelUDF($"x")) val query = filter.transform(measurements) .writeStream .queryName("EKFRateSourceGLMLog") .outputMode("append") .format("console") .start() query.awaitTermination() /** * ------------------------------------------- * Batch: 2 * ------------------------------------------- * +-------+----------+--------------------+--------------------+--------------------+--------------------+--------------------+ * |modelID|stateIndex| stateMean| stateCovariance| residualMean| residualCovariance| mahalanobis| * +-------+----------+--------------------+--------------------+--------------------+--------------------+--------------------+ * | 0| 5|[-0.0170639651961...|0.184650735418856...|[-0.0010775678634...| 21.24279669719657 |2.337969194146342E-4| * | 0| 6|[0.13372113418410...|0.097270109221418...|[2.3866966781327466]|21.892368858374287 | 0.5100947459174262| * | 1| 5|[0.21727975764867...|0.184289044729487...|[2.1590034862902434]| 20.72475537603141 | 0.47425141689857636| * | 1| 6|[0.16619831285685...|0.061682057710189...|[-1.0041419082389...|47.378255003177436 | 0.14588329445602757| * +-------+----------+--------------------+--------------------+--------------------+--------------------+--------------------+ * * ------------------------------------------- * Batch: 3 * ------------------------------------------- * +-------+----------+--------------------+--------------------+--------------------+--------------------+--------------------+ * |modelID|stateIndex| stateMean| stateCovariance| residualMean| residualCovariance| mahalanobis| * +-------+----------+--------------------+--------------------+--------------------+--------------------+--------------------+ * | 0| 7|[0.21489917361592...|0.033224082430061...|[2.0552241094850023]| 41.05191755271204 | 0.32076905295206193| * | 0| 8|[0.20921262270095...|0.013189448768817...|[-0.2695123923053...| 45.00295378232299 |0.040175216810467415| * | 1| 7|[0.18172674610899...|0.031522374731488...|[0.4671830982405272]| 27.29893710175946 | 0.08941579732539723| * | 1| 8|[0.19249146732117...|0.016052060247902...|[0.4615553206598477]|28.440753092452763 | 0.08654723860064477| * +-------+----------+--------------------+--------------------+--------------------+--------------------+--------------------+ * * ------------------------------------------- * Batch: 4 * ------------------------------------------- * +-------+----------+--------------------+--------------------+--------------------+--------------------+-------------------+ * |modelID|stateIndex| stateMean| stateCovariance| residualMean| residualCovariance| mahalanobis| * +-------+----------+--------------------+--------------------+--------------------+--------------------+-------------------+ * | 0| 9|[0.18171784672603...|0.007654793457034...|[-1.9635172993212...| 28.22667169246637 |0.36957696607714374| * | 1| 9|[0.17499288278196...|0.008676615020153...|[-1.070230083612481]|27.589047780543666 |0.20375524590073577| * +-------+----------+--------------------+--------------------+--------------------+--------------------+-------------------+ */
See examples for the full code