Online Linear Regression with Kalman Filter¶
Recursive estimation of least squares can be easily done with a Kalman Filter. Using state-space representation, the following linear model:

Can be represented in state-space form by:
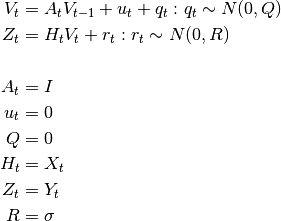
At each time step t, the state would give an estimate of the model parameters.
Scala¶
Import Kalman filter and start spark session.
import com.github.ozancicek.artan.ml.filter.LinearKalmanFilter import org.apache.spark.ml.linalg._ import org.apache.spark.sql.SparkSession import org.apache.spark.sql.functions._ val spark = SparkSession .builder .appName("LKFRateSourceOLS") .getOrCreate import spark.implicits._ val rowsPerSecond = 10 val numStates = 10
Since the aim is to estimate the model parameters, the state of the filter is model parameters. Labels will be represented with measurements vector with size 1. Features will be represented with a 1x3 measurement model matrix, which will map the state to measurements with a dot product.
// OLS problem, states to be estimated are a, b and c // z = a*x + b * y + c + w, where w ~ N(0, 1) val a = 0.5 val b = 0.2 val c = 1.2 val stateSize = 3 val measurementSize = 1 val noiseParam = 1.0 val featuresUDF = udf((x: Double, y: Double) => { new DenseMatrix(measurementSize, stateSize, Array(x, y, 1.0)) }) val labelUDF = udf((x: Double, y: Double, r: Double) => { new DenseVector(Array(a*x + b*y + c + r)) }) val features = spark.readStream.format("rate") .option("rowsPerSecond", rowsPerSecond) .load() .withColumn("mod", $"value" % numStates) .withColumn("stateKey", $"mod".cast("String")) .withColumn("x", ($"value"/numStates).cast("Integer").cast("Double")) .withColumn("y", sqrt($"x")) .withColumn("label", labelUDF($"x", $"y", randn() * noiseParam)) .withColumn("features", featuresUDF($"x", $"y"))
All of the filter parameters can be set either as an input dataframe column, or directly the value itself with ml.linalg.Vector or ml.linalg.Matrix. Specifying parameters from dataframe columns will allow you to have varying values across measurements/filters.
In this example, measurement and measurement model should be varying across measurements, so they’re set from dataframe columns. Process model, process noise, measurement noise and initial covariance can be same for all measurements/filters, so their values are set directly with matrices.
val filter = new LinearKalmanFilter() .setInitialStateMean(new DenseVector(Array(0.0, 0.0, 0.0))) .setInitialStateCovariance( new DenseMatrix(3, 3, Array(10.0, 0.0, 0.0, 0.0, 10.0, 0.0, 0.0, 0.0, 10.0))) .setStateKeyCol("stateKey") .setMeasurementCol("label") .setMeasurementModelCol("features") .setProcessModel(DenseMatrix.eye(stateSize)) .setProcessNoise(DenseMatrix.zeros(stateSize, stateSize)) .setMeasurementNoise(DenseMatrix.eye(measurementSize)) val truncate = udf((state: DenseVector) => state.values.map(t => (math floor t * 100)/100)) // The output 'state' column is a struct with mean and variance val query = filter.transform(features) .select($"stateKey", $"stateIndex", truncate($"state.mean").alias("modelParameters")) .writeStream .queryName("LKFRateSourceOLS") .outputMode("append") .format("console") .start() query.awaitTermination() /* ------------------------------------------- Batch: 53 ------------------------------------------- +--------+----------+-------------------+ |stateKey|stateIndex| modelParameters| +--------+----------+-------------------+ | 7| 61| [0.47, 0.48, 0.28]| | 3| 61| [0.46, 0.55, 0.56]| | 8| 61| [0.45, 0.61, 0.22]| | 0| 61|[0.53, -0.14, 1.81]| | 5| 61| [0.49, 0.27, 1.01]| | 6| 61| [0.47, 0.35, 1.02]| | 9| 61|[0.52, -0.13, 1.95]| | 1| 61| [0.52, 0.0, 1.63]| | 4| 61| [0.51, 0.13, 1.22]| | 2| 61|[0.53, -0.19, 1.82]| +--------+----------+-------------------+ ------------------------------------------- Batch: 54 ------------------------------------------- +--------+----------+-------------------+ |stateKey|stateIndex| modelParameters| +--------+----------+-------------------+ | 7| 62| [0.47, 0.49, 0.27]| | 3| 62| [0.46, 0.54, 0.57]| | 8| 62| [0.45, 0.65, 0.17]| | 0| 62| [0.53, -0.1, 1.76]| | 5| 62| [0.49, 0.27, 1.01]| | 6| 62| [0.48, 0.32, 1.06]| | 9| 62|[0.52, -0.11, 1.93]| | 1| 62| [0.51, 0.06, 1.56]| | 4| 62| [0.52, 0.06, 1.31]| | 2| 62| [0.54, -0.24, 1.9]| +--------+----------+-------------------+
See examples for the full code
Python¶
Import Kalman Filter and start spark session.
from artan.filter import LinearKalmanFilter from pyspark.sql import SparkSession import pyspark.sql.functions as F from pyspark.ml.linalg import Matrices, Vectors, MatrixUDT, VectorUDT from pyspark.sql.types import StringType spark = SparkSession.builder.appName("LKFRateSourceOLS").getOrCreate() num_states = 10 measurements_per_sec = 10
Since the aim is to estimate the model parameters, the state of the filter is model parameters. Labels will be represented with measurements vector with size 1. Features will be represented with a 1x3 measurement model matrix, which will map the state to measurements with a dot product.
# OLS problem, states to be estimated are a, b and c # z = a*x + b * y + c + w, where w ~ N(0, 1) a = 0.5 b = 0.2 c = 1.2 noise_param = 1 state_size = 3 measurement_size = 1 label_udf = F.udf(lambda x, y, w: Vectors.dense([x * a + y * b + c + w]), VectorUDT()) features_udf = F.udf(lambda x, y: Matrices.dense(1, 3, [x, y, 1]), MatrixUDT()) features = spark.readStream.format("rate").option("rowsPerSecond", measurements_per_sec).load()\ .withColumn("mod", F.col("value") % num_states)\ .withColumn("stateKey", F.col("mod").cast("String"))\ .withColumn("x", (F.col("value")/num_states).cast("Integer").cast("Double"))\ .withColumn("y", F.sqrt("x"))\ .withColumn("w", F.randn(0) * noise_param)\ .withColumn("label", label_udf("x", "y", "w"))\ .withColumn("features", features_udf("x", "y"))
All of the filter parameters can be set either as an input dataframe column, or directly the value itself with ml.linalg.Vector or ml.linalg.Matrix. Specifying parameters from dataframe columns will allow you to have varying values across measurements/filters.
In this example, measurement and measurement model should be varying across measurements, so they’re set from dataframe columns. Process model, process noise, measurement noise and initial covariance can be same for all measurements/filters, so their values are set directly with matrices.
lkf = LinearKalmanFilter()\ .setStateKeyCol("stateKey")\ .setMeasurementCol("label")\ .setMeasurementModelCol("features")\ .setInitialStateMean(Vectors.dense([0.0, 0.0, 0.0]))\ .setInitialCovariance(Matrices.dense(3, 3, [10, 0, 0, 0, 10, 0, 0, 0, 10]))\ .setProcessModel(Matrices.dense(3, 3, [1, 0, 0, 0, 1, 0, 0, 0, 1]))\ .setProcessNoise(Matrices.dense(3, 3, [0] * 9))\ .setMeasurementNoise(Matrices.dense(1, 1, [1])) truncate_udf = F.udf(lambda x: "[%.2f, %.2f, %.2f]" % (x[0], x[1], x[2]), StringType()) query = lkf.transform(features)\ .select("stateKey", "stateIndex", truncate_udf("state.mean").alias("modelParameters"))\ .writeStream\ .queryName("LKFRateSourceOLS")\ .outputMode("append")\ .format("console")\ .start() query.awaitTermination() """ ------------------------------------------- Batch: 32 ------------------------------------------- +--------+----------+-------------------+ |stateKey|stateIndex| modelParameters| +--------+----------+-------------------+ | 7| 74|[0.55, -0.30, 2.29]| | 3| 74|[0.55, -0.26, 1.87]| | 8| 74| [0.51, 0.18, 1.14]| | 0| 74| [0.47, 0.52, 0.41]| | 5| 74|[0.52, -0.01, 1.70]| | 6| 74| [0.49, 0.32, 1.13]| | 9| 74| [0.49, 0.39, 0.68]| | 1| 74|[0.52, -0.09, 2.15]| | 4| 74| [0.50, 0.05, 2.13]| | 2| 74| [0.49, 0.34, 0.77]| +--------+----------+-------------------+ ------------------------------------------- Batch: 33 ------------------------------------------- +--------+----------+-------------------+ |stateKey|stateIndex| modelParameters| +--------+----------+-------------------+ | 7| 75|[0.54, -0.19, 2.11]| | 7| 76|[0.54, -0.22, 2.16]| | 3| 75|[0.55, -0.24, 1.84]| | 3| 76|[0.55, -0.23, 1.82]| | 8| 75| [0.50, 0.18, 1.13]| | 8| 76| [0.50, 0.21, 1.10]| | 0| 75| [0.47, 0.54, 0.38]| | 0| 76| [0.47, 0.54, 0.38]| | 5| 75| [0.51, 0.07, 1.58]| | 5| 76| [0.50, 0.13, 1.50]| | 6| 75| [0.48, 0.35, 1.07]| | 6| 76| [0.48, 0.35, 1.07]| | 9| 75| [0.49, 0.35, 0.74]| | 9| 76| [0.49, 0.37, 0.71]| | 1| 75|[0.51, -0.03, 2.07]| | 1| 76|[0.51, -0.02, 2.04]| | 4| 75| [0.50, 0.06, 2.12]| | 4| 76| [0.50, 0.04, 2.15]| | 2| 75| [0.49, 0.36, 0.75]| | 2| 76| [0.49, 0.33, 0.79]| +--------+----------+-------------------+ """
See examples for the full code